Designing AI that knows when not to act
Designed an intervention system for motorcyclists that improves safety by controlling when and how the system intervenes.


Context
Motorcycling is a high-risk, attention-saturated activity.
Riders continuously process:
- speed
- road conditions
- navigation
- risk
Most rider technologies fail by:
- increasing visual load
- interrupting at the wrong time
After experiencing a motorcycle accident, I reframed the problem:
Not how to add information,
but how to intervene without adding cognitive load.

The problem
This was not an interface problem.
It was human–AI coordination under constraint:
- attention already saturated
- reaction time critical
- interruptions risky
The core challenge:
How does a system help without competing for attention?


The shift
I reframed the system from information delivery to intervention control.
From:
- more signals → fewer, higher-value signals
- constant assistance → selective intervention
- visibility → timing
In safety-critical systems:
Value comes from when the system acts, not how much it shows.
The system
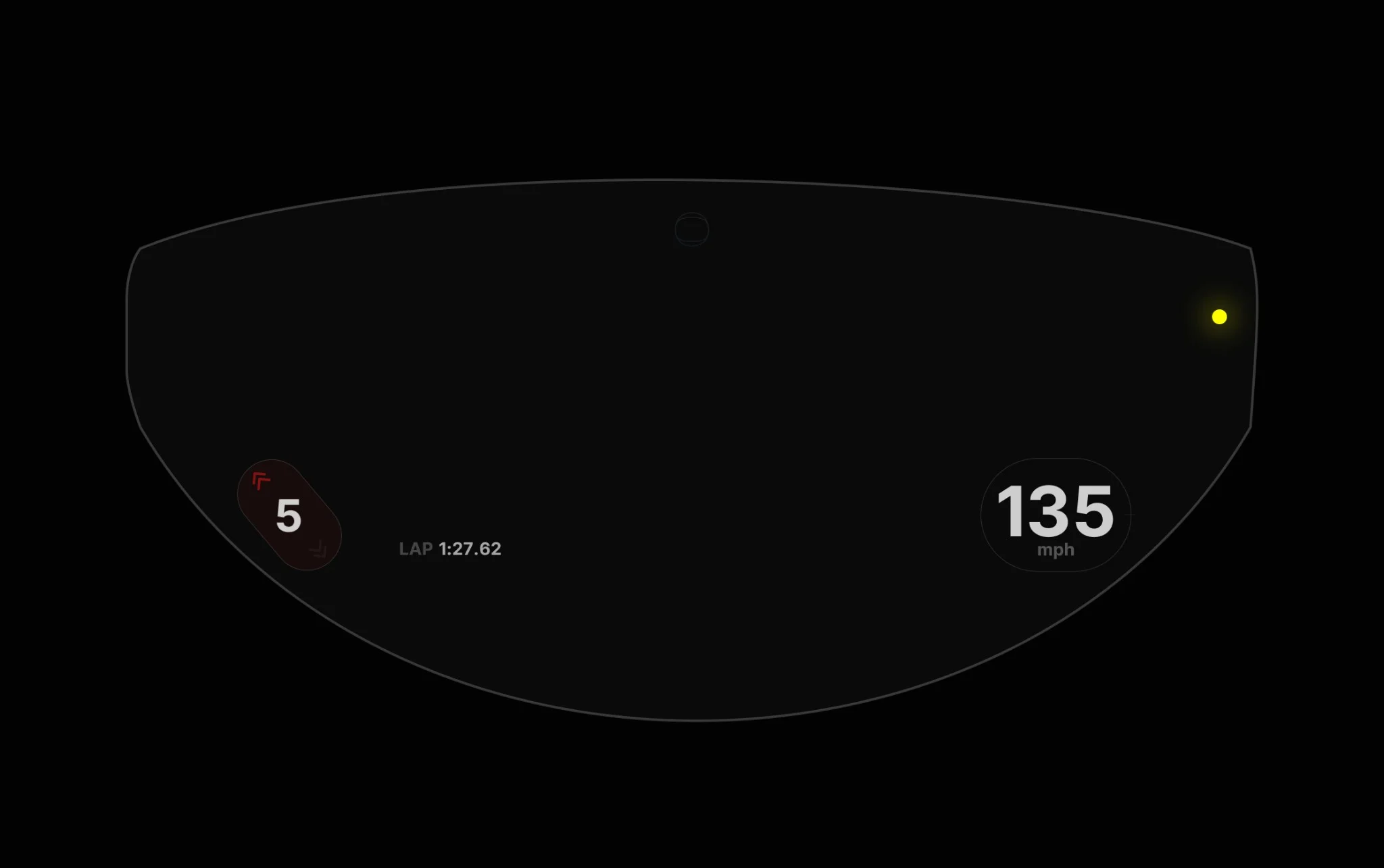
Gia operates as a real-time intervention system:
- Observes continuously
- Predicts high-risk moments
- Intervenes selectively
- Stays silent when confidence is low
The system prioritizes what not to surface.




Design & prototyping
I focused on identifying when riders have cognitive availability versus overload.
This included:
- mapping high-risk vs low-attention moments
- testing voice timing under real riding constraints
- evaluating when intervention improves vs disrupts
Every decision was evaluated against:
Does this reduce cognitive burden in motion?
Voice
Voice was the primary interface.
When eyes and hands are occupied, spoken cues preserve situational awareness.
- short
- contextual
- timed to moments of availability
This was not conversational AI.
It was controlled intervention.

Design decisions
-
Selective intervention over constant feedback
The system only surfaces high-value signals.
Result: higher trust and lower cognitive load.
-
Haptics and voice over visual interfaces
Reduced reliance on visual attention.
Result: safer interaction under motion.
-
Timing over information density
Optimized when signals appear, not how many.
Result: improved reaction and reduced distraction.
-
Behavioral adaptation over configuration
System learns from rider behavior instead of setup.
Result: lower friction and more natural integration.
-
Explicit failure states over false confidence
Defined how the system behaves under uncertainty.
Result: increased reliability and trust.

Tradeoffs
Designing for safety required restraint:
- Less information vs safer interaction
- Fewer features vs higher trust
- Conservative outputs vs perceived intelligence
We prioritized reliability over capability.
Impact
Gia demonstrates a viable model for AI in attention-constrained environments:
- Reduced reliance on visual interfaces
- Higher trust through predictable intervention
- Improved signal-to-noise ratio
- Better alignment between system behavior and rider expectations
The key validation:
AI effectiveness depends on restraint and timing, not capability.
Reflection
Gia changed how I think about AI systems.
The challenge is not intelligence.
It is control.
Designing when a system should act, remain silent, or defer requires defining boundaries, not features.
Key takeaways:
- attention is the primary constraint
- timing matters more than capability
- trust comes from restraint